.png?width=400&height=150&name=My%20project-1%20(1).png)

When most people hear robot, they picture a shiny humanoid with glowing eyes, metal limbs, and a stiff walk straight out of science fiction. But robotics is far broader and older than that stereotype.
Long before AI assistants and silicon chips, early inventors were crafting intricate machines powered by steam, springs, and ingenuity. Fast forward to today, and robots are everywhere: building cars, assisting surgeons, navigating warehouses, and yes, even vacuuming our living rooms.
But as robotics continues to expand into software-driven spaces like Robotic Process Automation (RPA), where bots live in your browser, not on your factory floor, it’s easy to get lost in the terminology.
That’s why we created this robot glossary. A complete A to Z guide to robotics terms, explained clearly, with examples and a touch of humor. Whether you're reading an academic paper or decoding what your tech-savvy coworker means by end effector, this glossary has you covered.
Czech writer Karel Čapek coined the term "robot" in his 1920 play R.U.R. (Rossum’s Universal Robots). The word was derived from the Czech word "robota," meaning forced labor. Although the idea came from his brother Josef, Karel Čapek popularized it in literature.
Whether you're a student, a professional in the field, or just curious about robots, this glossary will help you make sense of core robotics terminology. Want to see how these terms evolved? Explore the history of robotics to trace the roots of today’s robot technology.
Actuator: The “muscle” of the robot. It converts control signals into movement, rotating, lifting, or pushing components into action. Powered by electric motors, hydraulics, or pneumatics.
Adaptive Control: A type of control system that allows robots to modify their behavior in real time based on environmental feedback. Useful for unpredictable or dynamic tasks.
Aerobot: An aerial robot capable of flying autonomously, often used in environmental monitoring, surveillance, or drone-based delivery systems.
Algorithm: A set of programmed rules or instructions that a robot follows to make decisions or carry out tasks. Algorithms are the core of robot intelligence and movement planning.
Android: A humanoid robot designed to resemble an adult human male. The ‘andro’ prefix is in reference to the assigned masculine gender of the machine.
Articulated manipulator: A robot arm with multiple joints (like a human shoulder, elbow, wrist) that allows it to move in several directions. Common in manufacturing and welding lines.
Automaton: A mechanically driven device that mimics life or performs repetitive tasks. Popular in ancient engineering, some even powered by water or clockwork.
Autonomous vehicle: A self-driving robot (car, drone, rover) that navigates and makes decisions without human control, using sensors, GPS, and onboard AI.
Axis/degree of freedom: Describes how many directions or rotations a robot can move in. A typical robotic arm might have 6 degrees of freedom, allowing for complex, lifelike motion.
Battery Management System (BMS): Software and hardware that monitor and manage a robot’s battery performance, preventing overheating or overcharging.
Bionics: The integration of biological principles into robotics, like mimicking how muscles work or how insects walk to improve robot design.
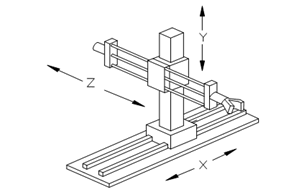 function of a cartesian robotic art, courtesy of toshiba.com
function of a cartesian robotic art, courtesy of toshiba.com
Cartesian manipulator: A robot that moves in straight lines along the X, Y, and Z axes. Think 3D printers or CNC machines, precise, linear, and ideal for pick-and-place tasks.
Central processing unit: The robot’s “brain.” It interprets signals from sensors and controls actions across the system.
Chassis: The structural frame or base of a robot on which components like actuators, sensors, and processors are mounted.
Cloud robotics: Robots that rely on cloud computing to process data or coordinate behavior, ideal for fleets of connected bots or lightweight designs.
Cobots: Short for collaborative robots, these are designed to work safely alongside humans. Often used on mixed manufacturing lines or in healthcare.
Collision Detection: A safety system that allows robots to recognize and avoid contact with objects, humans, or other robots. Often tied to vision or proximity sensors.
Compliance: A robot’s ability to yield or adapt to force or unexpected interference, often engineered in for safety or delicate work.
Controller System: The overarching computer system that directs the robot’s actions, storing programs, running calculations, and managing sensors and actuators.
Cyborg: A blend of “cybernetic” and “organism”, part machine, part human. Think neural implants, robotic limbs, or wearable exoskeletons.
Degrees of Freedom (DOF)" While "Axis/degree of freedom" is already mentioned, this deserves its own entry as it’s a foundational robotics concept, the number of independent movements a robot can perform.
Drive System: The mechanism that propels a mobile robot, could be wheels, tracks, or legs. Common drive types include differential, omnidirectional, and Ackermann steering.
Downtime: When a robot isn't working due to failure, maintenance, or reprogramming. A critical metric in manufacturing environments.
Edge Computing: A method where robots process data locally (on the robot itself) rather than relying on cloud servers. Reduces latency and enables faster real-time decisions.
Encoder: A sensor that tracks the position or rotation of a motor shaft, enabling precise motion control in robotic joints or wheels.
End effector: The tool at the end of a robotic arm. Can be a gripper, welder, paint sprayer, or surgical instrument depending on the task.
 An example of an end-effector on an industrial robot (source: robotics.org)
An example of an end-effector on an industrial robot (source: robotics.org)
Feedback sensor: Provides real-time environmental or mechanical data to the robot, helping it adjust movements or decisions dynamically.
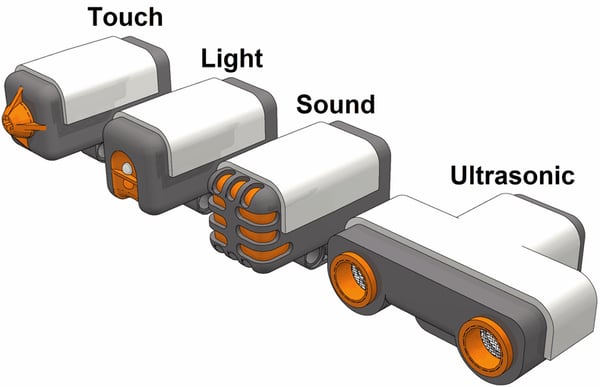 Different variants of robot sensors (source: http://iggyclass.blogspot.com)
Different variants of robot sensors (source: http://iggyclass.blogspot.com)
Force limiting: A safety feature that caps how fast or hard a robot can move, preventing injury during human interaction.
Force Sensor: Measures pressure or force exerted by the robot, useful for fragile tasks like assembling electronics or pouring drinks.
Gantry: A large, overhead support structure that lets a robot move along fixed rails. Often used for high-precision or heavy-duty industrial robots.
Gynoid: A female-presenting humanoid robot. The counterpart to androids, typically used in research or media portrayals of robotics.
 Example of a feminized robot from the video game Starcraft II
Example of a feminized robot from the video game Starcraft II
Haptic: Touch-based feedback used to give robots sensitivity to surfaces and force. Enables delicate tasks like handling glass or medical tools.
Harness: Wiring and cables bundled together to deliver power and data throughout a robot.
Hexapod: A six-legged walking robot modeled after insects. Known for stability and adaptability on rough terrain.

Humanoid: Any robot with a body plan similar to a human. Includes both androids and gynoids and used for advanced AI interaction and mobility research.
Hydraulics: Uses pressurized fluid to generate mechanical movement. Common in heavy-load robots or exoskeletons.
Industrial robot: Robots purpose-built for manufacturing. Think welding arms, packaging bots, or pick-and-place machines on an assembly line.
Input device: A control or programming interface — joystick, touch panel, keyboard — that allows humans to direct or teach robot behavior.
Intelligent robot: A robot that can adapt based on sensor data or prior experience. Combines robotics with AI to perform complex, unstructured tasks.
Jacobian matrix: A mathematical tool used to calculate how a robot's joint movements translate into end effector movement. Crucial in robot motion planning.
Laser: Used in robots for measuring distance, guiding cutting paths, or precise welding. Also common in autonomous navigation (LiDAR systems).
Nanobot: Microscopic robots (often theoretical or experimental) built at the nanoscale, used in medicine, chemistry, or materials science.
Payload: The maximum weight a robot can carry without performance loss. Key factor in selecting robots for lifting or transport tasks.
Pinch Points: Hazardous areas in robot joints where limbs or clothing could be caught. Often marked with warning labels.
Pneumatics: Generates robotic motion using compressed air. Quieter and cleaner than hydraulics, often used in lightweight or delicate bots.
Powered Exoskeleton: Wearable robotics designed to enhance human strength or mobility. Used in rehabilitation, military, and industrial lifting.
The mech is a sci-fi staple and dramatic example of what exoskeletons could one day be
Prosthetic: A robotic or programmable limb replacement. Modern versions include sensor inputs and adaptive motion for amputees.
Robot: A machine capable of carrying out tasks independently, based on programmed instructions or environmental feedback.
RPA: Software bots that perform repetitive digital tasks, no physical robot involved. Common in finance, HR, and customer service.
Sensor: Devices that let robots "see," "feel," or "hear" their environment. Includes cameras, pressure sensors, proximity detectors, and more.
Singularity: A point where a robot’s arm joints align in a way that limits movement. Not to be confused with the AI singularity!
Uptime: The opposite of downtime, how long a robot operates without interruption. High uptime is a sign of reliable performance.
To make sense of robotics terms, it helps to first understand how robots are categorized. Here's a breakdown of the most common robot types you’ll encounter:
These are the backbone of factories worldwide, built for speed, precision, and repetition. Whether it’s welding car frames or assembling smartphones, industrial robots get the job done.
Examples:
Key terms: Actuator, payload, end effector, downtime
Service robots work directly with people in homes, offices, and public spaces. They vacuum floors, deliver room service, and even check in hotel guests.
Examples:
Key terms: Cobots, haptic, feedback sensor
These bots think (a little) for themselves. Using AI, sensors, and software, autonomous robots can navigate environments and adapt to changing inputs, no remote control needed.
Examples:
Key terms: Cloud robotics, feedback sensor, intelligent robot
Shaped like us, and sometimes eerily lifelike. Humanoid robots include androids (male-formed) and gynoids (female-formed), and they’re often used in AI research and entertainment.
Examples:
Key terms: Android, gynoid, humanoid, articulated manipulator
These terms get tossed around a lot, sometimes interchangeably, but they mean different things.
Robotics is all about physical machines that can move, sense, and act. Robots typically include hardware, software, and actuators to carry out tasks without direct human control.
Automation refers to the broader concept of making systems run without human intervention. It can be mechanical, software-driven, or involve robots, but doesn’t require them.
Let’s clear up a big point of confusion: RPA has nothing to do with physical robots.
| Term | What it means | Example |
| Robot | A programmable machine that interacts physically | A robotic arm welding car frames |
| Automation | Any system that operates without manual control | An automated sprinkler system |
| RPA | Software bots that mimic digital tasks | Like a virtual assistant copying invoices into a CRM |
Robots aren’t just sci-fi; they’re reshaping how entire industries work. Here’s where they’re making an impact:
Have more questions? Find the answers here.
The key components of a robot are sensors, actuators, a control system, power supply, and end effectors. Sensors gather data, actuators move parts, the control system processes input and controls behavior, the power supply provides energy, and end effectors perform specific tasks like gripping or welding.
The main difference between robotics and automation is that robotics involves machines that can be programmed to perform tasks autonomously, while automation refers to using technology to complete processes with minimal human intervention. Robotics often falls under automation but focuses on flexible, adaptive physical machines.
Sensors in robotics work by detecting physical inputs like light, temperature, distance, or motion and converting them into electrical signals. These signals are processed by the robot’s control system to make decisions or adjust behavior. Sensors enable robots to perceive and interact with their environment accurately.
Cobots, or collaborative robots, are robots designed to work safely alongside humans. They are used in manufacturing, healthcare, logistics, and assembly lines to assist with tasks like lifting, positioning, or inspecting parts. Cobots enhance productivity by combining human flexibility with robotic precision and consistency.
The 5 major fields of robotics are mechanical engineering, electrical engineering, computer science, control systems, and artificial intelligence. Mechanical engineering designs the robot’s structure, electrical engineering powers and connects components, computer science programs behavior, control systems manage movement, and AI enables perception and decision-making.
Now that you understand these commonly searched for robotics terms, you should know everything you need to in order to explore the latest developments in robotics and AI! While you’re at it, take a look at some of the types of robots to get a good sense of what people are talking about in the field today.
Interested in learning more about robotics? Discover how Isaac Asimov’s three laws of robotics have been used for decades to program morality.
This article was originally published in 2021. It has been updated with new information.
.png)

Have you ever wished you could be in two places at once?
 by Piper Thomson
by Piper Thomson
Robotics is one facet of artificial intelligence that everyone knows about to some degree –...
 by Rebecca Reynoso
by Rebecca Reynoso

There’s no ‘I’ in team. Unless you’re operating with a swarm intelligence.
by Piper Thomson